- промы́шленный ро́бот
-
устройство (машина) с программным или дистанционным (с пульта) управлением, предназначенное для замены человека в производственных процессах. Попытки создать машину, способную выполнять за человека тяжёлую, опасную для жизни или утомительно однообразную работу, предпринимались уже в 18–19 вв. с началом развития промышленного производства. Но даже наиболее удачные из них были громоздки, а возможности их ограниченны. Чешский писатель К. Чапек в нач. 20 в. ввёл в обиход слово «робот» – механический человек.Первые роботы, имитировавшие движения человека и имевшие с ним внешнее сходство, использовались преимущественно в развлекательных целях. По мере развития машиностроения и совершенствования автоматики роботы всё больше теряли бесполезное внешнее сходство с человеком. Зато их движения стали разнообразнее, «осмысленнее», у них появились «специальности», они получили наименование – промышленные роботы.Большинство современных промышленных роботов – роботы-манипуляторы. Они имеют механическую руку с различными захватными приспособлениями, имитирующую движения руки человека. Помимо руки, промышленный робот оснащён встроенным устройством программного управления на базе микропроцессора. Промышленные роботы имеют перед человеком преимущество в скорости и точности реализации однообразных операций, они способны производить движения, какие человек физически выполнить не может. Роботы-манипуляторы широко применяются в промышленности для автоматизации многих технологических процессов при конвейерной сборке различных изделий (от автомобилей до микросхем), сварке, ковке, окраске, сверлении, перемещении тяжёлых грузов и т. д. Особое значение имеет применение роботов-манипуляторов при работе с вредными химическими веществами, при обезвреживании взрывных устройств, в кузнечных и литейных цехах, на цементных заводах, в помещениях с повышенным уровнем радиации, в условиях относительной недоступности (в морских глубинах, на космических аппаратах и орбитальных станциях) и т. д.
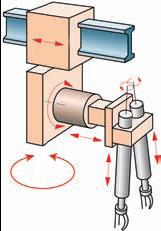 Кинематическая схема двуручного манипулятора с 8 степенями подвижности (стрелками показаны направления возможных перемещений его звеньев)
Кинематическая схема двуручного манипулятора с 8 степенями подвижности (стрелками показаны направления возможных перемещений его звеньев)
Энциклопедия «Техника». — М.: Росмэн. 2006.
.